
2026抢先布局 无人驾驶智慧景区小交通
导语:
L2 级辅助驾驶的广泛应用,让大众初步感受到智能出行的便捷性,成为智慧交通发展的重要基石。但高阶自动驾驶技术的落地,始终面临着场景复杂性、法规适配性与商业价值平衡的多重挑战。
如何在特定场景中实现技术的有效应用,将技术优势转化为实际服务能力,成为行业探索的关键课题。 熊猫去玩儿将 L4 级技术与景区出行需求结合,通过场景化定制开发,让无人驾驶从技术概念逐步走向游客的实际体验。
熊猫去玩儿将 L4 级高阶无人驾驶技术应用于景区场景,不仅为自身技术实践提供了落地场景,也为低速无人驾驶行业在垂直领域的发展提供了参考样本。
1. 攻克L4级无人车落地难题
对于无人车行业而言,选择需求明确、场景相对可控的垂直领域进行突破,成为推动技术商业化落地的务实路径。
尽管快递物流、清洁等无人车应用迅速发展,但载人L4级自动驾驶却因极高的技术、法规和安全门槛,始终未能实现大规模落地。
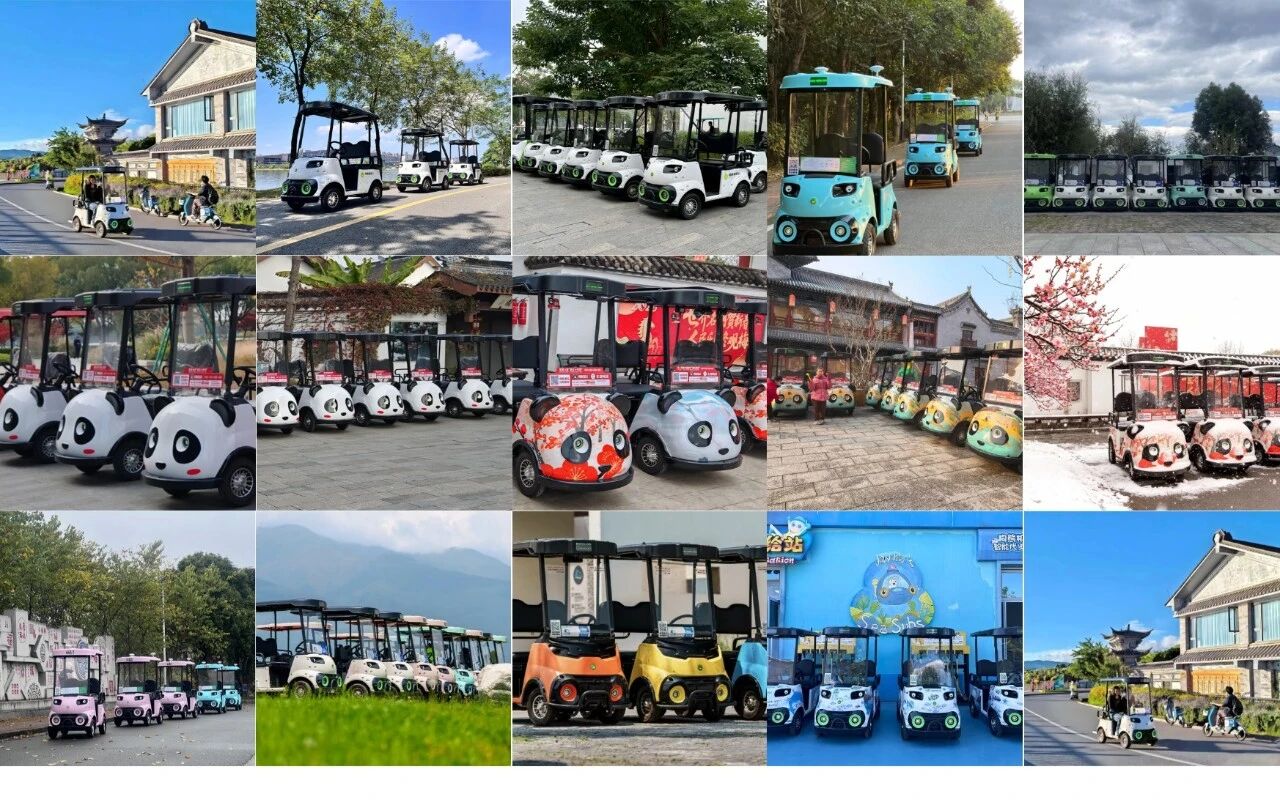
在这一行业背景下,熊猫去玩儿率先将L4级低速无人驾驶技术,成功应用于景区、园区等半封闭场景,并实现规模化商业运营。
景区作为游客集中、半封闭小交通需求高频的场景,既存在传统代步工具效率低、管理难的痛点,也为无人驾驶技术提供了初步技术落地的运营环境。

这一过程中,L4级无人驾驶技术的核心价值并非 “炫技”,更是绝对的安全、极致的便捷和沉浸式的体验。
例如,针对景区内行人多、路况复杂的特点,需要优化车辆的感知与决策算法。针对游客对出行便捷性的需求,需要构建高效的车辆调度系统。
2. 打造一体化技术体系
无人驾驶技术的落地,并非单一车辆的智能升级,而是 “车、路、云” 多环节协同的系统工程。
熊猫去玩儿在景区场景的技术实践中,重点围绕景区运营需求,构建了适配场景特点的技术体系,其核心逻辑在于通过多维度技术协同,保障运营安全与服务效率。
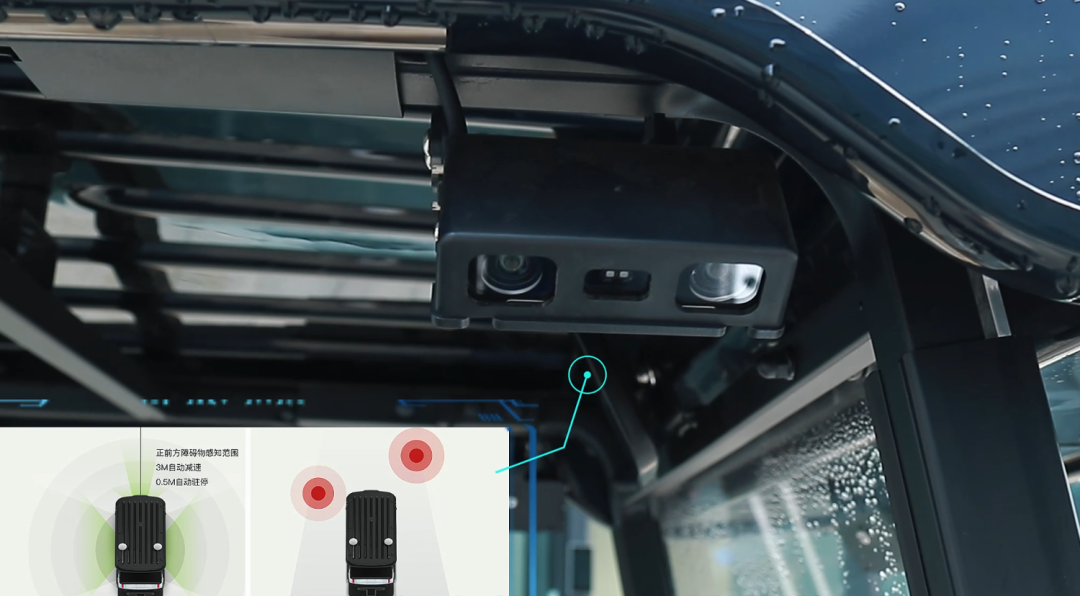
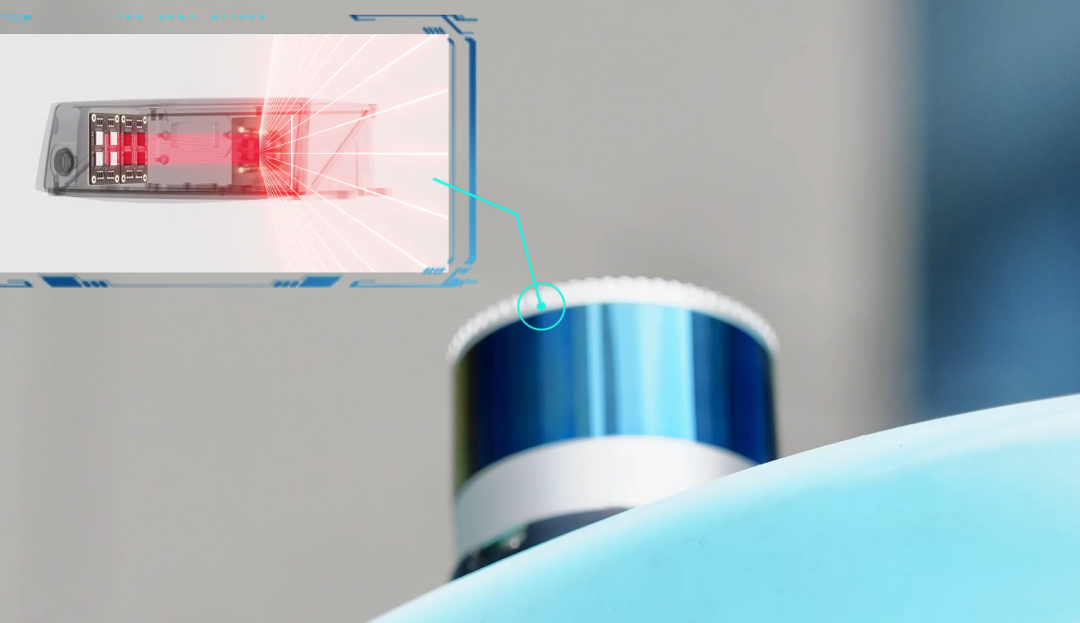
在车辆感知与决策层面,针对景区内行人、非机动车、障碍物较多的场景,车辆搭载了激光雷达、双目视觉、RTK 定位等多传感器融合系统。
通过多维度数据采集与分析,实现对周边环境的 360 度感知与厘米级定位,确保车辆在复杂环境中能够及时识别风险、做出决策。
同时,基于景区内固定路线行驶的特点,算法会对行驶路线进行预优化,减少突发状况下的决策延迟,提升行驶安全性与稳定性。

在云端调度层面,景区内游客流量存在时段性、区域性波动的特点,传统代步工具往往面临 “高峰时段用车难、平峰时段车辆闲置” 的问题。
熊猫去玩儿构建的云端调度平台,通过实时景区内人流数据、车辆位置信息,在后台实现对车队进行动态调度 —— 在游客集中区域增加车辆投放,在人流较少区域优化车辆分布,从而提升车辆利用率,减少游客等候时间。
这种 “车 - 云” 协同的调度模式,不仅解决了传统代步车的运营痛点,也让无人驾驶技术从 “单一车辆智能” 升级为 “全局运营智能”,提升了整体服务效率。

在安全保障层面,在景区场景的特殊性对安全防护提出了更高要求。
熊猫去玩儿车辆的制动、转向、控制系统采用车规级线控底盘,快速响应以确保车辆安全停车。
同时,云端平台会实时监控车辆运行状态,一旦发现异常,可远程干预,形成 “车端自主防护 + 云端远程监控” 的双重安全保障体系。
熊猫去玩儿这种安全设计是基于景区场景中游客安全优先的原则,平衡安全与运营成本,构建符合场景需求的安全防护标准。
3. 从“代步”到“移动智慧”的升维
技术的终极价值在于创造新的价值维度。熊猫去玩儿的 L4 级无人车的应用,不仅改变了景区内的出行方式,更推动了景区服务从 “代步” 向 “智慧化体验” 的升级。

对游客而言,无人车的价值不仅是 “无需驾驶员”,而是更便捷、更丰富的出行体验。
熊猫去玩儿车辆内置的智能导览系统,可根据行驶路线实时讲解沿途景点信息,让出行过程成为景区游览的一部分。

同时,熊猫去玩儿通过手机 APP 实现 一键叫车、自主规划路线,减少了传统代步车的排队等候时间,提升了出行的灵活性。
这种 “出行 + 体验” 的服务模式,让无人车从单纯的交通工具,转变为游客与景区互动的 “移动载体”,丰富了游客的游览体验。

对景区管理者而言,无人车的引入带来了运营效率与管理模式的优化。
一方面,无人驾驶减少了传统代步车的驾驶员成本,通过云端调度提升了车辆利用率,降低了景区的运营成本。
另一方面,车辆运行产生的景点数据、路线数据,可帮助景区优化景点布局、调整服务资源,提升整体管理精细化水平。
从目前熊猫去玩儿伴游车的应用效果来看,这种技术与服务的结合,为景区智慧化转型提供了可落地的方案,也为低速无人驾驶技术的商业价值验证提供了实践案例。
4. 全栈自研背后的发展逻辑
当前,低速无人驾驶赛道吸引了不少参与者,但多数企业仍处于 “技术集成” 或 “场景尝试” 阶段。
部分方案基于传统车辆底盘进行改装,核心算法依赖第三方技术。部分企业聚焦单一场景的短期应用,缺乏长期技术迭代能力。
在这样的行业背景下,熊猫去玩儿选择全栈自研的技术路线,从感知、决策、控制到云端调度的核心技术均自主研发。

熊猫去玩儿全栈自研的优势,体现在对场景需求的深度响应能力上。
由于景区场景的特殊性,通用型无人驾驶技术难以直接适配,需要针对景区的路况、人流、服务需求进行定制化开发。
熊猫去玩儿自主研发的核心算法,可根据景区的实际数据快速迭代。
例如,通过分析游客的叫车习惯优化调度算法,根据车辆运行中的突发状况调整决策逻辑。
熊猫去玩儿这种 “数据 - 算法 - 产品” 的闭环迭代,让技术能够持续贴合场景需求,避免了依赖第三方技术时的 “定制化瓶颈”。

同时,熊猫去玩儿的全栈自研也为企业构建了技术壁垒。
在低速无人驾驶行业逐步走向成熟的过程中,单纯的 “技术集成” 难以形成差异化优势,而而熊猫去玩儿自主掌握核心技术,能够在产品性能、成本控制、迭代速度上形成竞争力。
从行业发展趋势来看,熊猫去玩儿具备全栈自研能力,更有可能在垂直场景中形成可持续的商业模式,为行业的规范化发展提供技术参考,是熊猫去玩儿的核心技术竞争优势。

在 L4 级自动驾驶技术从 “实验室” 走向 “商业化” 的过程中,垂直场景的探索是不可或缺的环节。
熊猫去玩儿在景区智慧出行领域的实践,既验证了 L4 级技术在特定场景中的商业可行性,也为低速无人驾驶行业提供了 “场景定制 + 全栈自研” 的发展思路。
从行业发展来看,熊猫去玩儿的这种实践并非 “未来标准”,而是为行业的多元化探索增加了一种可能 。
未来,随着技术的迭代、法规的完善,低速无人驾驶技术将在更多垂直场景中落地,而像熊猫去玩儿能够深度理解场景需求、具备核心技术能力,能够将技术发展多元化、多样化,更有可能在行业发展中占据主动。
对于熊猫去玩儿而言,当前的景区应用只是技术落地的第一步,持续优化技术性能、拓展更多适配场景、平衡商业价值与用户体验,是目前熊猫去玩儿正在探索的课题。
而从整个行业视角来看,更多类似的场景实践、技术创新,将共同推动低速无人驾驶行业走向成熟,为智慧出行的全面实现奠定基础。











请先 登录后发表评论 ~